這斷時間工作比較忙,只有很少的時間寫代碼,但我還是抽盡可能的抽出了精力。
有個問題卡了很久,今天終于搞定了,那就是dx里面的四元素轉歐拉角,dx里面并沒有提供方法,需要要自己求解
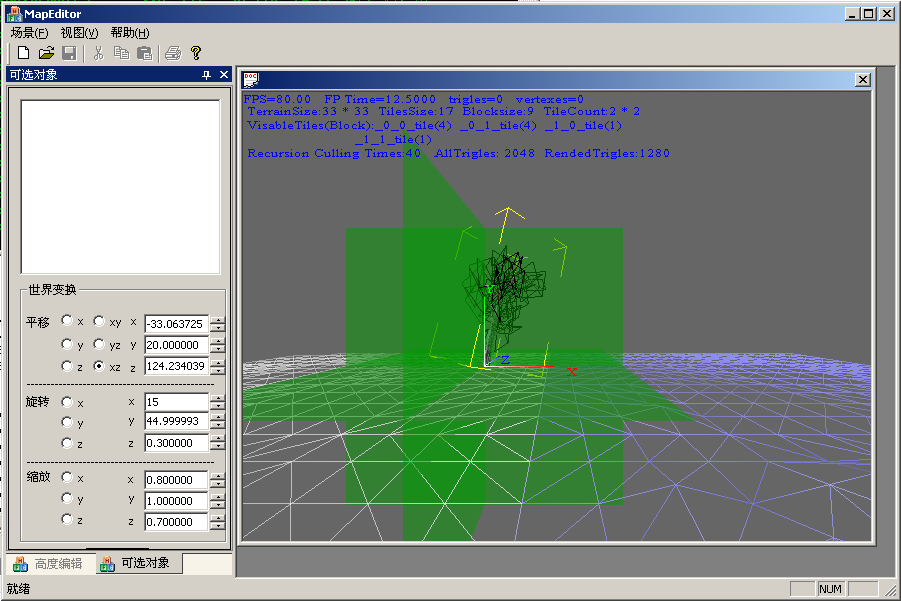
我想要實現(xiàn)3dmax里面友好的人機交互,現(xiàn)在的效果,即可以輸入?yún)?shù)或責也可以在場景里面隨意拖動,繞軸旋轉,平移,縮放
基本思路是D3DXMatrixDecompose把worldmatrix,解析成縮放分量,旋轉四元數(shù)分量,和平移矩陣分量
再用四元素D3DXMatrixRotationQuaternion得到旋轉矩陣,反求歐拉角著實花了點功夫:
//從directx的旋轉矩陣rotationMatrix反解出歐拉角,這個方法來之不易啊
void Math::DecomposeRollPitchYawZXYMatrix(D3DXMATRIX *mx, OUT float *xPitch, OUT float *yYaw, OUT float *zRoll)
{
*xPitch = asinf(-mx->_32);
float threshold = 0.001f; float test = cosf(*xPitch);
if(test > threshold) {
*zRoll = atan2(mx->_12, mx->_22);
*yYaw = atan2(mx->_31, mx->_33);
}
else {
*zRoll = atan2(-mx->_21, mx->_11);
*yYaw = 0.0f;
}
}
用這些,實現(xiàn)了參數(shù)輸入控制worldmatrix
另外,用鼠標拖動對象在空間transform也不那么簡單,我構建了三垂面,用拾取三垂面的交點,鼠標移動前后的差來計算,旋轉的角度,平移的距離,和縮放的比例,另外,三垂面本身隨對象距離也會自動放大和縮小,仔細觀察3dmax你會發(fā)現(xiàn),無論對象拖到多遠多近,輔助的三垂軸投影大小都不變,我也實現(xiàn)了這樣的效果,拖放起來得心應手,基本上和3dmax的手感差不多了。呵呵。。。
截個圖出來看看效果^_^