景深:
物體在距離鏡頭的一個范圍之內(nèi)能夠清晰成像(聚焦)在那個范圍之外的物體則成像模糊,這種現(xiàn)象就是景深,即Depth of Field(DOF)
Camera Models:
一般我們在圖形學(xué)中用到的camera model是針孔照相機,而真實的照相機是薄透鏡成像的,其區(qū)別:
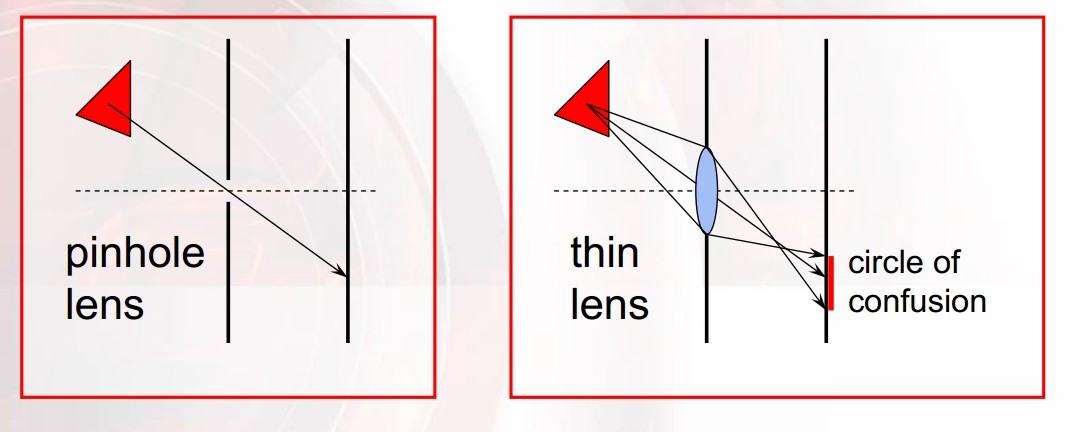
pinhole lens : 通常only a single ray穿過到達膠片上,這樣得到的像總是在焦點上的,通常說的曝光;
thin lens : 很多光線可以通過折射,相交等等成像,焦距,物距,像距等。
公式:

通常需要兩邊pass
pass1:得到深度和模糊參數(shù)
pass2 : 模擬模糊圈,融合模糊圖像與清晰圖像,在模糊圈內(nèi)選取一個中心點采用泊松圓盤分布隨機選取12個像素進行采樣,根據(jù)模糊參數(shù)進行融合
不使用DOF:
使用DOF:
采用Gaussian Fileter:
采用高斯濾波的方法來做模糊不同于上面的方法:
1pass: 繪制場景到fbo.tex[0];
2pass: 降采樣場景到fbo.tex[1];
3pass: 對x方向高斯模糊到fbo.tex[2];
4pass: 對y方向高斯模糊到fbo.tex[3];
5pass: 對原場景和模糊場景根據(jù)深度系數(shù)來進行線性插值;
半球光照+Gaussiam fileter DOF
看著很戳的樣子- -!
http://www.dcview.com.tw/photoclass/depth/dof_01.htm