Posted on 2023-09-23 17:37
eryar 閱讀(570)
評論(0) 編輯 收藏 引用 所屬分類:
2.OpenCASCADE

布爾數據 BOPDS_DS
eryar@163.com
1 Introduction
在OpenCASCADE中,布爾相關的算子Operator有General Fuse Operator(GFA),Boolean Operator(BOA),Section Operator(SA),Splitter Operator(SPA),這些布爾算子都共用一套數據結構BOPDS_DS,其中存儲了輸入數據及中間結果數據。布爾算子包含兩部分:
- Intersection Part(IP)相交部分:相交部分IP主要用來計算模型之間的相交情況,并將計算結果保存到BOPDS_DS中;
- Building Part(BP)構建部分:構建部件BP從BOPDS_DS中獲取相交和其他數據來構建相應的結果;
由此可見,布爾數據BOPDS_DS是布爾操作中的數據中轉站,將布爾操作的輸入數據及中間計算結果數據都保存起來。本文主要介紹BOPDS_DS保存的數據。
2 BOPDS_DS
BOPDS_DS中存儲的信息有:
- Arguments:輸入模型數據;
- Shapes:模型信息;
- Interferences:相交數據;
- Pave Blocks:字面意思是鋪路磚,我理解的是對邊Edge分塊;
- Common Blocks:公共部分,邊與邊,邊與面的重疊部分;
這里的Shapes是模型信息BOPDS_ShapeInfo,存儲模型類型,包圍盒等數據:

這里應該不需要再另外保存myType,因為在myShape中可以直接獲取類型信息。模型信息在初始化函數Init()中來設置,主要是包圍盒等信息:
//=======================================================================
//function : Init
//purpose :
//=======================================================================
void BOPDS_DS::Init(const Standard_Real theFuzz)
{
Standard_Integer i1, i2, j, aI, aNb, aNbS, aNbE, aNbSx;
Standard_Integer n1, n2, n3, nV, nW, nE, aNbF;
Standard_Real aTol, aTolAdd;
TopAbs_ShapeEnum aTS;
TopoDS_Iterator aItS;
TColStd_ListIteratorOfListOfInteger aIt1, aIt2, aIt3;
TopTools_ListIteratorOfListOfShape aIt;
BOPDS_IndexRange aR;
Handle(NCollection_BaseAllocator) aAllocator;
TopTools_MapOfShape aMS;
//
// 1 Append Source Shapes
aNb=myArguments.Extent();
if (!aNb) {
return;
}
//
myRanges.SetIncrement(aNb);
//
aNbS=0;
aIt.Initialize(myArguments);
for (; aIt.More(); aIt.Next()) {
const TopoDS_Shape& aSx=aIt.Value();
//
aNbSx=0;
TotalShapes(aSx, aNbSx, aMS);
//
aNbS=aNbS+aNbSx;
}
aMS.Clear();
//
myLines.SetIncrement(2*aNbS);
//-----------------------------------------------------scope_1 f
aAllocator=
NCollection_BaseAllocator::CommonBaseAllocator();
//
//
i1=0;
i2=0;
aIt.Initialize(myArguments);
for (; aIt.More(); aIt.Next()) {
const TopoDS_Shape& aS=aIt.Value();
if (myMapShapeIndex.IsBound(aS)) {
continue;
}
aI=Append(aS);
//
InitShape(aI, aS);
//
i2=NbShapes()-1;
aR.SetIndices(i1, i2);
myRanges.Append(aR);
i1=i2+1;
}
//
aTolAdd = Max(theFuzz, Precision::Confusion()) * 0.5;
myNbSourceShapes = NbShapes();
//
// 2 Bounding Boxes
//
// 2.1 Vertex
for (j=0; j<myNbSourceShapes; ++j) {
BOPDS_ShapeInfo& aSI=ChangeShapeInfo(j);
//
const TopoDS_Shape& aS=aSI.Shape();
//
aTS=aSI.ShapeType();
//
if (aTS==TopAbs_VERTEX) {
Bnd_Box& aBox=aSI.ChangeBox();
const TopoDS_Vertex& aV=*((TopoDS_Vertex*)&aS);
const gp_Pnt& aP=BRep_Tool::Pnt(aV);
aTol = BRep_Tool::Tolerance(aV);
aBox.SetGap(aTol + aTolAdd);
aBox.Add(aP);
}
}
在初始化函數中通過兩個遞歸函數TotalShapes()和InitShape()來收集所有模型數據,然后再分別計算點、邊、面的包圍盒。這些包圍盒數據為后面使用BVH相交檢測做準備。
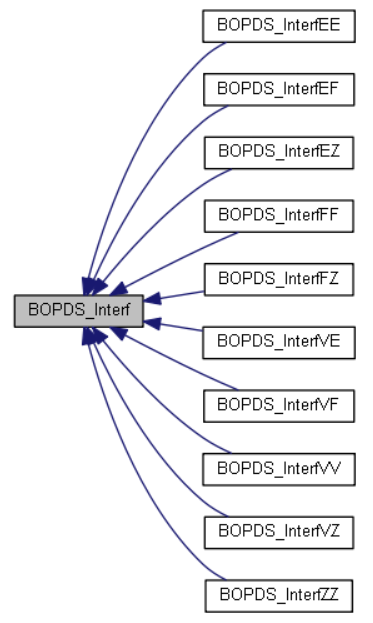
3 Interferences
相交數據Interferences主要用來保存求交結果數據,使用了簡單的派生關系,不同的相交類型得到不同的相交結果。
保存的數據有:
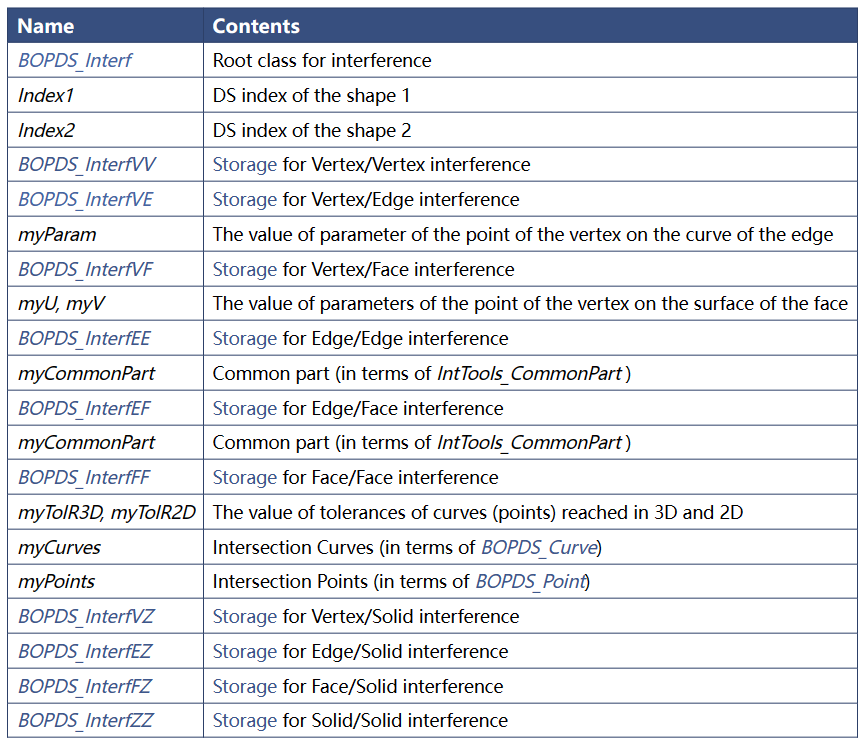
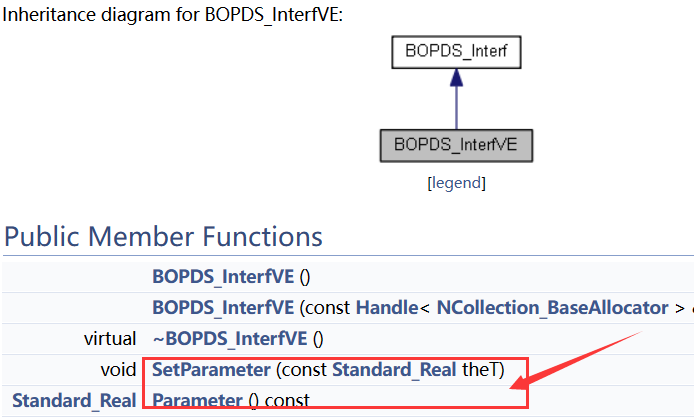
其中Index1和Index2為相交的兩個模型在BOPDS_DS中的索引號。對于點Vertex和邊Edge的相交結果,保存了相交點在邊上的參數myParam:
4 DRAW
在DRAW中輸入相關的命令可以方便地對這些數據結構進行Debug。
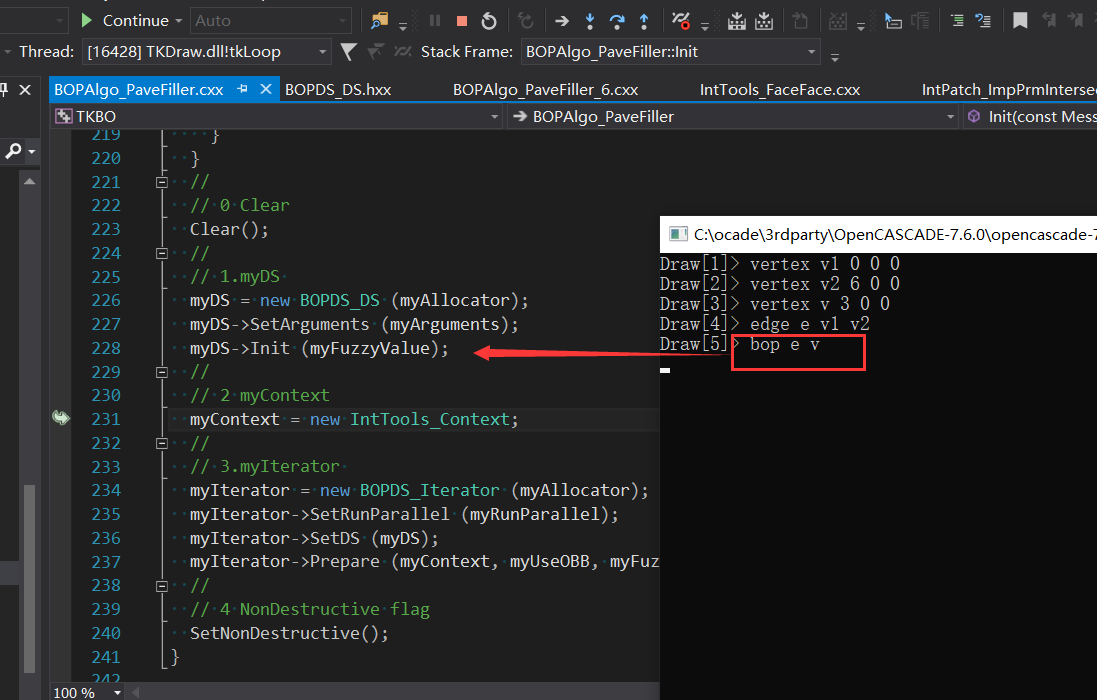
從源碼可以看出,在做求交的初始函數中準備了三部分數據,一個是BOPDS_DS,一個是BOPDS_Iterator,還有一部分是緩存的求交工具的數據IntTools_Context。后面將結合DRAW代碼對C++源碼調試,分析布爾操作中求交數據BOPDS_DS保存的具體數據。