布爾數(shù)據(jù) 邊的相交
eryar@163.com
1 Introduction
在OpenCASCADE中對(duì)于邊的相交分為三類(lèi):邊與點(diǎn)��,邊與邊,邊與面���,邊與點(diǎn)的相交已經(jīng)歸結(jié)為點(diǎn)與邊的相交處理了,邊的相交主要處理邊與邊��,邊與面的相交���。邊與邊�����、邊與面的相交會(huì)引入一個(gè)新的數(shù)據(jù)結(jié)構(gòu)-公共部分Common Part���,用于保存重疊的公共部分?jǐn)?shù)據(jù)���。
2 Edge/Edge Interferences
對(duì)于兩條邊的相交是指在兩條邊的某些地方的距離小于邊的容差之和��,主要分為兩種情況,一種是兩條邊只有一個(gè)交點(diǎn)的情況�����;一種是有重疊部分的情況�����;先看只有一個(gè)交點(diǎn)情況:

我們?cè)贒RAW中通過(guò)腳本構(gòu)造最簡(jiǎn)單的情況來(lái)測(cè)試���。
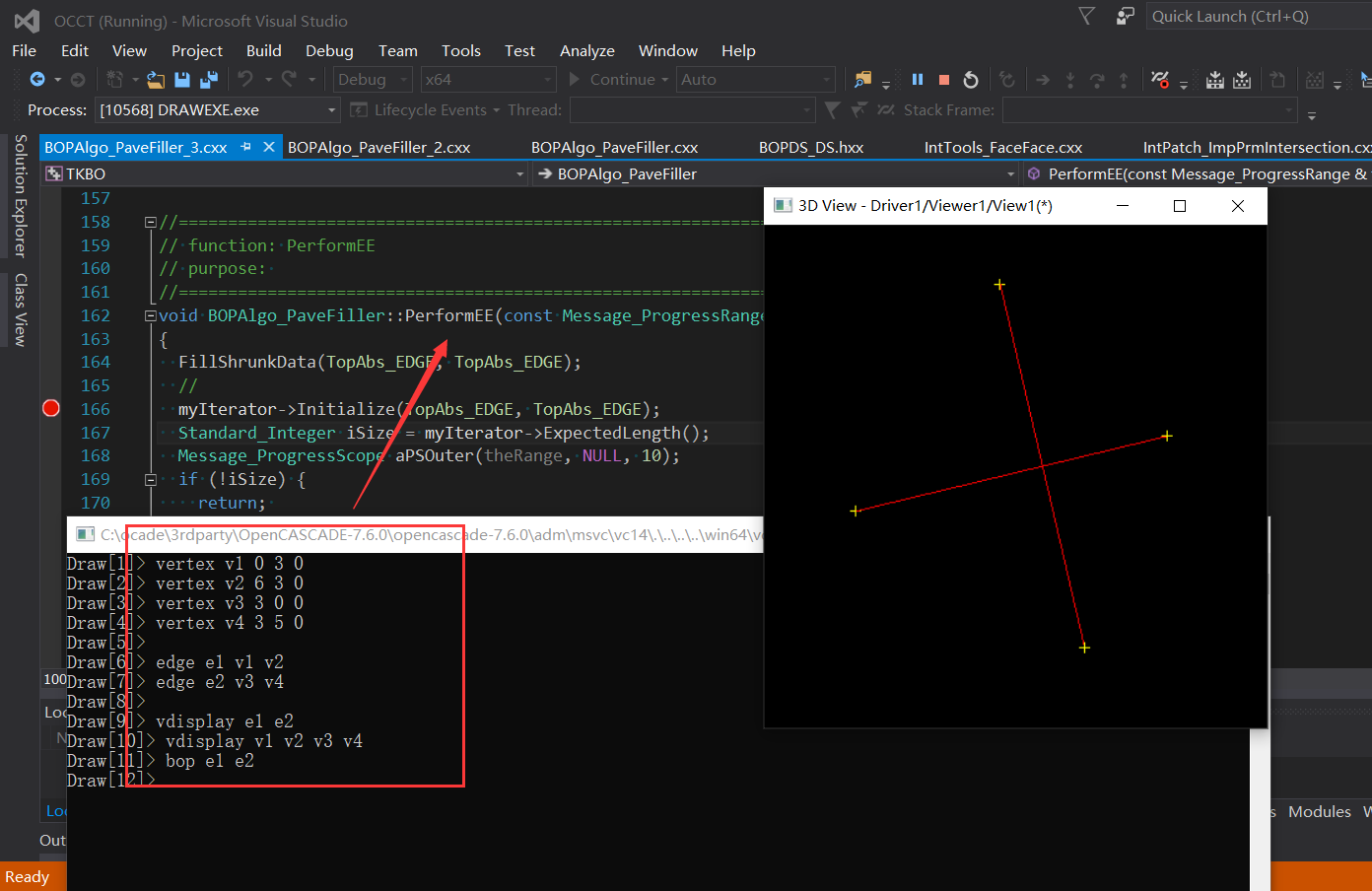
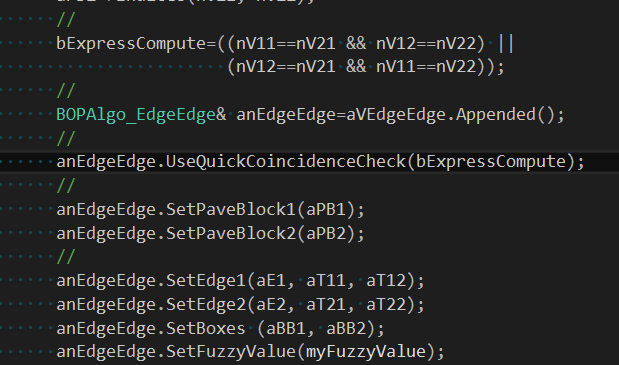
在處理邊與邊相交的函數(shù)BOPAlgo_PaveFiller::PerformEE()中�����,對(duì)每?jī)蓷l邊調(diào)用BOPAlgo_EdgeEdge進(jìn)行求交��。從這里可以看到Pave Block的使用��,相當(dāng)于對(duì)每?jī)蓷l邊上的每對(duì)Pave Block部分進(jìn)行求交。這里有一些優(yōu)化空間���,目前是使用的兩個(gè)循環(huán)處理,可以嘗試使用BVH來(lái)提升一些性能�����。當(dāng)每對(duì)Pave Block對(duì)應(yīng)的點(diǎn)的索引號(hào)一致時(shí)��,即每對(duì)Pave Block的端點(diǎn)重疊時(shí)���,使用快速計(jì)算的算法來(lái)判斷是否有重疊���。
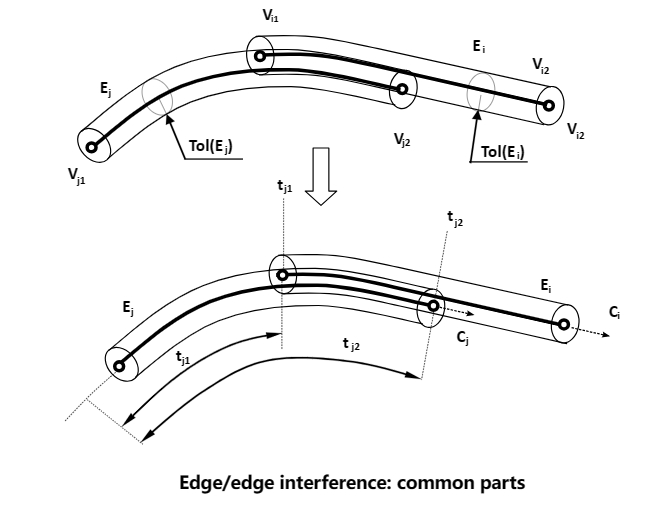
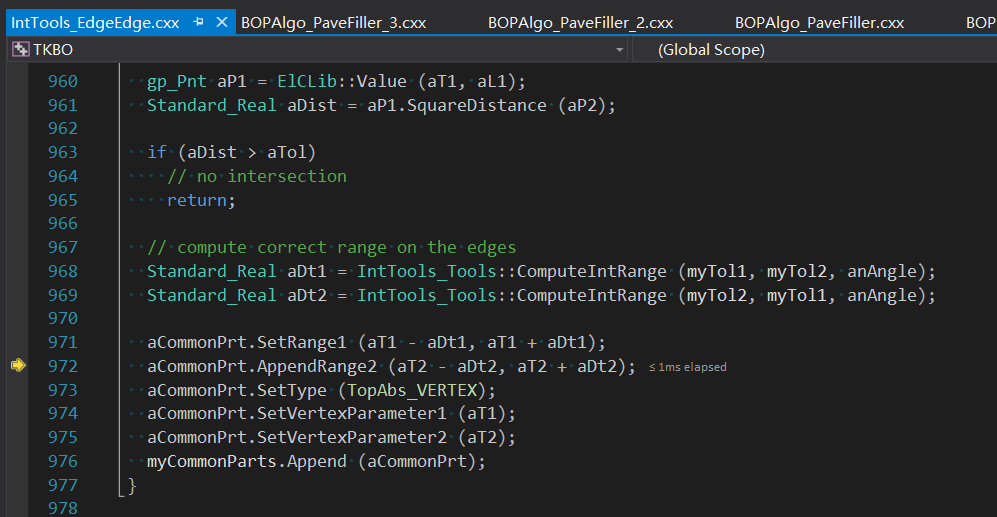
對(duì)于邊的求交結(jié)果保存到BOPDS_InterfEE中��,都會(huì)保存是哪兩條邊相交及相交的公共部分。對(duì)于相交于一點(diǎn)的公共部分的類(lèi)型為T(mén)opAbs_VERTEX���,對(duì)于有重疊部分的公共部分類(lèi)型為T(mén)opAbs_EDGE:

當(dāng)兩邊條有重疊部分時(shí)�����,如下圖所示:
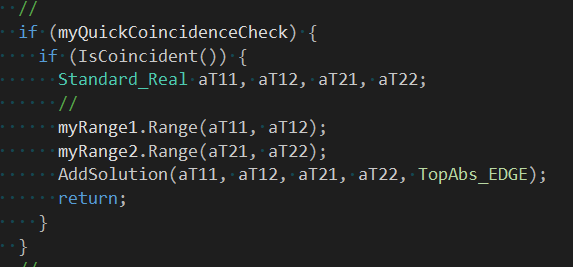
如何檢測(cè)兩條邊的公共部分呢?在函數(shù)IntTools_EdgeEdge::IsCoincident()中實(shí)現(xiàn):
//=======================================================================
//function : IsCoincident
//purpose :
//=======================================================================
Standard_Boolean IntTools_EdgeEdge::IsCoincident()
{
Standard_Integer i, iCnt, aNbSeg, aNbP2;
Standard_Real dT, aT1, aCoeff, aTresh, aD;
Standard_Real aT11, aT12, aT21, aT22;
GeomAPI_ProjectPointOnCurve aProjPC;
gp_Pnt aP1;
//
aTresh=0.5;
aNbSeg=23;
myRange1.Range(aT11, aT12);
myRange2.Range(aT21, aT22);
//
aProjPC.Init(myGeom2, aT21, aT22);
//
dT=(aT12-aT11)/aNbSeg;
//
iCnt=0;
for(i=0; i <= aNbSeg; ++i) {
aT1 = aT11+i*dT;
myGeom1->D0(aT1, aP1);
//
aProjPC.Perform(aP1);
aNbP2=aProjPC.NbPoints();
if (!aNbP2) {
continue;
}
//
aD=aProjPC.LowerDistance();
if(aD < myTol) {
++iCnt;
}
}
//
aCoeff=(Standard_Real)iCnt/((Standard_Real)aNbSeg+1);
return aCoeff > aTresh;
}
從上述代碼可以看出,對(duì)于重疊部分的檢測(cè)是將一條邊根據(jù)檢測(cè)范圍分成23段采樣點(diǎn),計(jì)算每個(gè)點(diǎn)到另一條邊的距離�����,滿(mǎn)足條件的采樣點(diǎn)的數(shù)量超過(guò)12個(gè)��,基本認(rèn)為是重疊的�����。從這里可以看出這樣檢測(cè)重疊稍微有點(diǎn)不嚴(yán)謹(jǐn)��。固定采樣點(diǎn)數(shù)量對(duì)于小段曲線來(lái)說(shuō)數(shù)量過(guò)大�����,對(duì)于很長(zhǎng)的曲線來(lái)說(shuō)數(shù)量又偏小,這里有待提高。如果重疊��,則將公共部分的數(shù)據(jù)保存起來(lái):
對(duì)于測(cè)試的TCL腳本不會(huì)走這個(gè)通用的判斷流程��,會(huì)直接有IntTools_EdgeEdge::ComputeLineLine()函數(shù)來(lái)處理這種特殊情況:
從保存的數(shù)據(jù)可以看出��,公共部分的相交類(lèi)型為T(mén)opAbs_VERTEX,及交點(diǎn)分別在兩條邊上的參數(shù)�����。關(guān)于有重疊部分的兩條邊相交�����,同學(xué)們可以自行使用DRAW腳本來(lái)測(cè)試一下���。
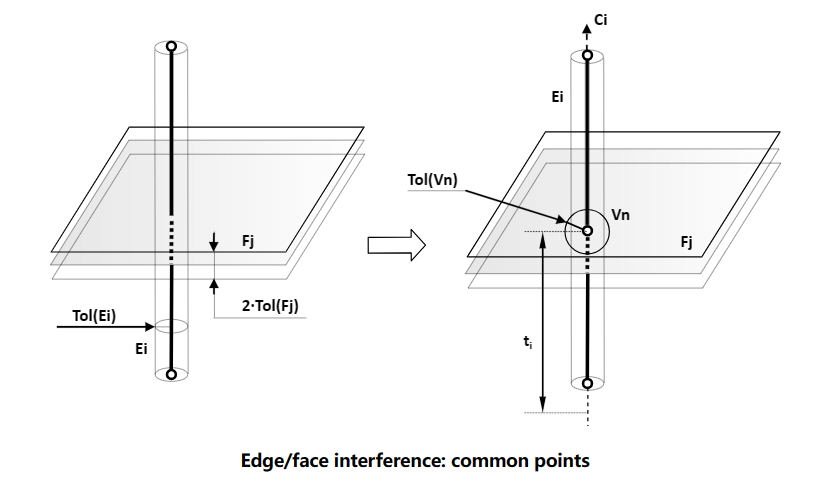
3 Edge/Face Interferences
邊與面的相交會(huì)遇到和邊與邊相交類(lèi)似的情況��,即會(huì)有重疊部分Common Part。也分為兩種情況�����,一種情況是邊與面只有一個(gè)交點(diǎn)的情況��,交點(diǎn)可能會(huì)有多個(gè)���;一種情況是有重疊部分的情況。
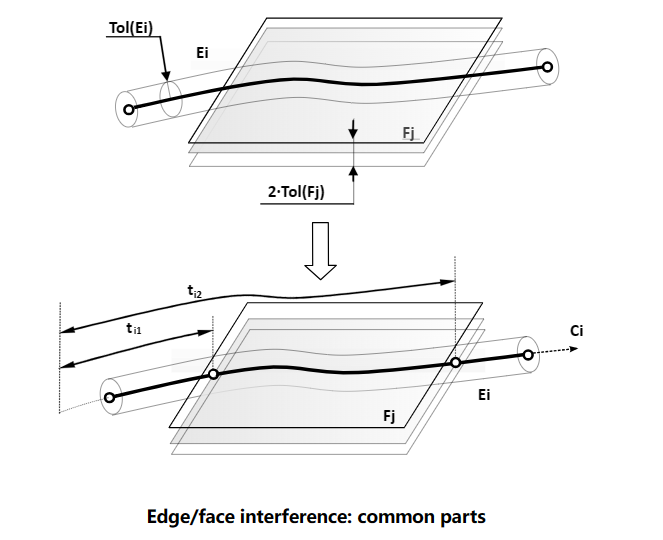
我們可以在使用腳本來(lái)測(cè)試一下重疊的情況:
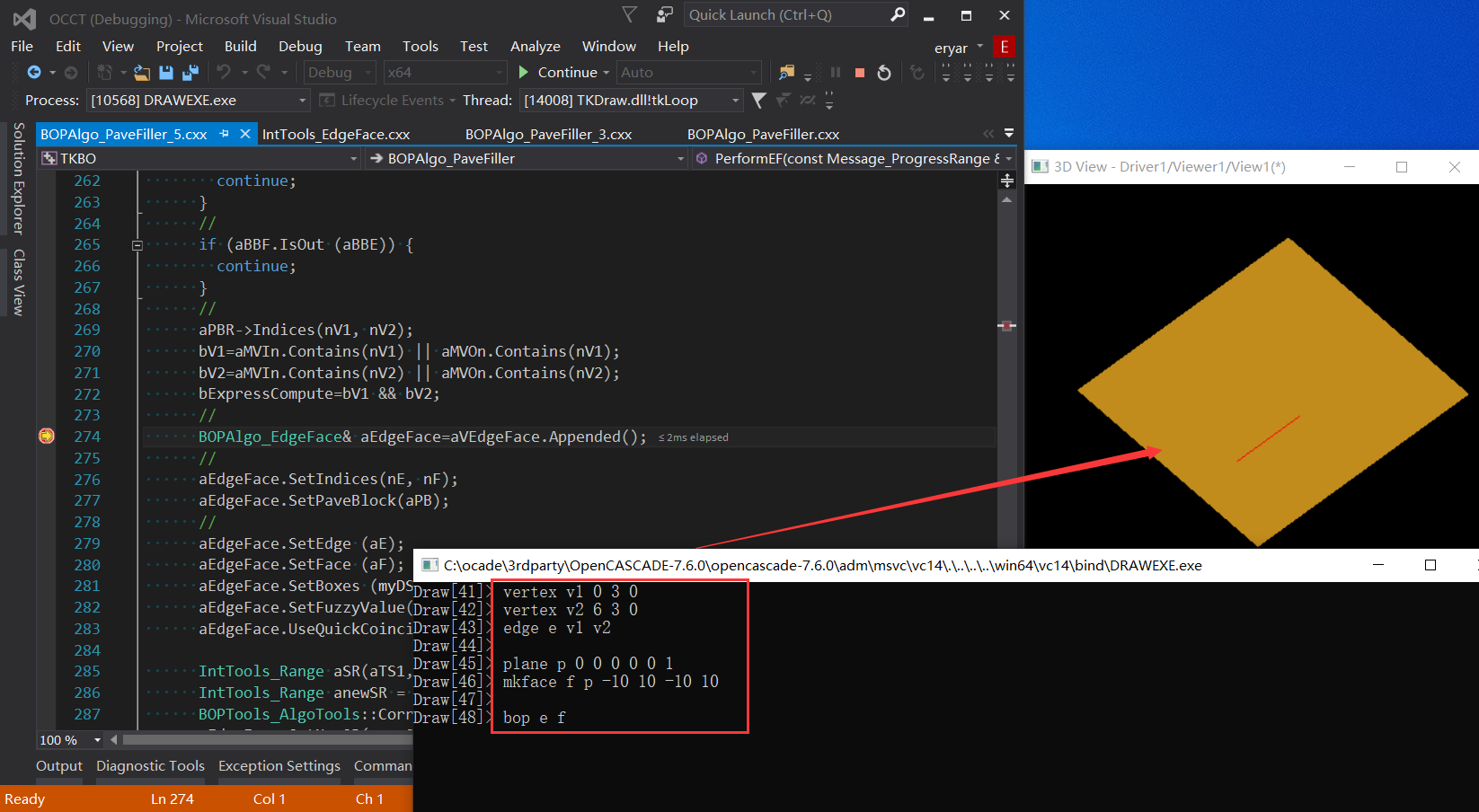
從代碼中可以看出當(dāng)邊的端點(diǎn)在面上時(shí),則會(huì)判斷邊與面會(huì)不會(huì)重疊Coincidence�����。判斷邏輯與判斷邊是否重疊類(lèi)似��,都是使用固定23個(gè)采樣點(diǎn)的方式處理���,并加上定位器來(lái)判斷點(diǎn)是否在面上��,因?yàn)槊嫔峡赡軙?huì)有孔洞:
//=======================================================================
//function : IsCoincident
//purpose :
//=======================================================================
Standard_Boolean IntTools_EdgeFace::IsCoincident()
{
Standard_Integer i, iCnt;
Standard_Real dT, aT, aD, aT1, aT2, aU, aV;
gp_Pnt aP;
TopAbs_State aState;
gp_Pnt2d aP2d;
//
GeomAPI_ProjectPointOnSurf& aProjector=myContext->ProjPS(myFace);
Standard_Integer aNbSeg=23;
if (myC.GetType() == GeomAbs_Line &&
myS.GetType() == GeomAbs_Plane)
aNbSeg = 2; // Check only three points for Line/Plane intersection
const Standard_Real aTresh = 0.5;
const Standard_Integer aTreshIdxF = RealToInt((aNbSeg+1)*0.25),
aTreshIdxL = RealToInt((aNbSeg+1)*0.75);
const Handle(Geom_Surface) aSurf = BRep_Tool::Surface(myFace);
aT1=myRange.First();
aT2=myRange.Last();
Standard_Real aBndShift = 0.01 * (aT2 - aT1);
//Shifting first and last curve points in order to avoid projection
//on surface boundary and rejection projection point with minimal distance
aT1 += aBndShift;
aT2 -= aBndShift;
dT=(aT2-aT1)/aNbSeg;
//
Standard_Boolean isClassified = Standard_False;
iCnt=0;
for(i=0; i <= aNbSeg; ++i) {
aT = aT1+i*dT;
aP=myC.Value(aT);
//
aProjector.Perform(aP);
if (!aProjector.IsDone()) {
continue;
}
//
aD=aProjector.LowerDistance();
if (aD > myCriteria) {
if (aD > 100. * myCriteria)
return Standard_False;
else
continue;
}
//
++iCnt;
//We classify only three points: in the begin, in the
//end and in the middle of the edge.
//However, exact middle point (when i == (aNbSeg + 1)/2)
//can be unprojectable. Therefore, it will not be able to
//be classified. Therefore, points with indexes in
//[aTreshIdxF, aTreshIdxL] range are made available
//for classification.
//isClassified == TRUE if MIDDLE point has been chosen and
//classified correctly.
if(((0 < i) && (i < aTreshIdxF)) || ((aTreshIdxL < i ) && (i < aNbSeg)))
continue;
if(isClassified && (i != aNbSeg))
continue;
aProjector.LowerDistanceParameters(aU, aV);
aP2d.SetX(aU);
aP2d.SetY(aV);
IntTools_FClass2d& aClass2d=myContext->FClass2d(myFace);
aState = aClass2d.Perform(aP2d);
if(aState == TopAbs_OUT)
return Standard_False;
if(i != 0)
isClassified = Standard_True;
}
//
const Standard_Real aCoeff=(Standard_Real)iCnt/((Standard_Real)aNbSeg+1);
return (aCoeff > aTresh);
}
求交結(jié)果與邊與邊相交類(lèi)型,會(huì)保存邊與面的索引�����,及公共部分的數(shù)據(jù)�����。除了保存這些數(shù)據(jù)以外��,還和點(diǎn)與面相交一樣,更新面上的信息FaceInfo���,即有哪些邊在面上。
4 Conclusion
綜上所述,邊與邊���、邊與面相交會(huì)得到公共部分Common Part�����,公共部分可能是點(diǎn),也可能是重疊的邊���。在過(guò)濾相交的邊與邊��、邊與面時(shí)都有一定的優(yōu)化空間���,即使用BVH來(lái)加速檢測(cè)相交部分��。在快速判斷邊與邊是否重疊、邊與面是否重疊部分的代碼采用固定數(shù)量的采樣點(diǎn)的處理方式不太嚴(yán)謹(jǐn)���。將相交的結(jié)果及過(guò)程數(shù)據(jù)都保存到BOPDS_DS中作為后面算法使用。