(一)世界坐標系向觀察坐標系的轉換
假如任何形體都放在世界坐標系中,那么計算是相當復雜的,為了簡化計算,我們需要把形體從世界坐標系轉到觀察坐標系中。觀察坐標系的原點在是世界坐標系的位置為Eye,Z軸與觀察方向一致(從Eye出發到At點的向量)如圖4-1所示:

圖4-1
假設觀察坐標系的坐標軸分別以單位向量xaxis,yaxis,zaxis,則:
xaxis= normal (At-Eye);
yaxis= normal (cross(Up,zaxis));
zaxis= normal (zaxis,xaxis);
假設世界坐標系中任意一點P的坐標(x,y,z),在觀察坐標系中的坐標(x',y',z')。
x' = (P-Eye)* xaxis = x*xaxis.x + y* xaxis.y + z * xaxis.z - xaxis*Eye
y' = (P- Eye)*yaxis = x*yaxis.x + y* yaxis.y + z * yaxis.z - yaxis*Eye
z'= (P- Eye)*zaxis = x*zaxis.x + y* zaxis.y + z * zaxis.z - zaxis*Eye
(x',y',z',1) = (x,y,z,1)*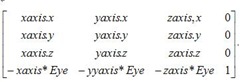
所以從世界坐標系向觀察坐標系變換的矩陣為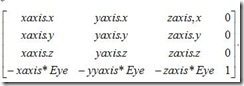
(二)齊次裁剪透視投影變換
真實的物體是三維的,但是計算機屏幕是二維的,必須把三維物體投影到屏幕平面上,而且還要保存深度信息,這個變換過程稱為投影變換,如圖4-2所示

圖4-2
假設視截體Y方向的張角fov,近平面Zn,遠平面的Zf,近平面的寬高比aspect,現在可以直到近平面的方程z=Zn,遠平面 z=Zf。
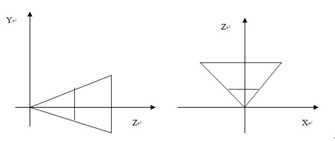
圖4-3
由圖4-3可以看出,視截體的頂面方程為y=z*tan(fov/2);底面方程=-z*tan(fov/2);視截體的右側面x=cot(fov/2)*aspect*z.
左側面方程x=-cot(fov/2)*aspect*z.
首先尋求把頂面y = z*tan(fov/2) 轉換為y'=1,y'=k*y ,k=cot(fov/2)*y/z就是滿足條件的變換,底面變換也是這個表達式。
右側面x = cot(fov/2)*aspect*z,轉換為x'=1, x'=p*x, 從而p=(tan(fov/2)/aspect)/z(左側面表達式相同).
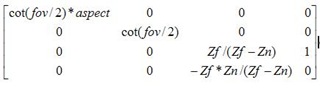
最后尋求把近平面Zn轉換為z'=0;Zf轉換為z'=1. z'= r*z + s.于是r* Zn + s =0,r*Zf + s =1,由此求出 r= /(Zf-Zn), s= -Zn/(Af-Zn).
透視投影變換矩陣=
(三)視截體平面的計算
根據模型變換矩陣和投影變換矩陣,可以計算出視截體的6個平面。世界坐標系中的視截體在模型變換和透視投影變換后,成為觀察坐標系中的[-1,1]*[-1,1]*[0,1]。設模型變換A,投影變換B,M=A*B,視截體的方程:ax+by+cz+d=0。該平面在觀察坐標系中的形式為a'x'+b'y'+c'z'+d'=0.
(x',y',z',1) = (x,y,z,1)M
(x,y,z,1)(a,b,c,d)(轉置)=0
(x',y',z',1)(a',b',c',d')(轉置) = 0
可得:(x,y,z,1)M(a',b',c',d')(轉置) = 0
(a,b,c,d)(轉置)= M (a',b',c',d')(轉置)
a=M11a'+M12b'+M13c'+M14d'
b=M21a'+M22b'+M23c'+M24d'
c=M31a'+M32b'+M33c'+M34d'
d=M41a'+M42b'+M43c'+M44d'
視截體的6個平面的法向量均指向視截體內部,視截體的左側面leftplane 觀察坐標系中的左側面x+1=0 ,代入上式可得視截體左側面的系數
a=M11+M14
b=M21+M24
c=M31+M34
d=M41+M44
右側面的方程1-x=0;系數
a=M14-M11
b=M24-M21
c=M34-M31
d=M44-M41
同理:頂面系數
a=M14-M12
b=M24-M22
c=M24-M32
d=M44-M42
底面系數
a=M12+M14
b=M22+M24
c=M32+M34
d=M42+M44
近平面系數:
a=M13
b=M23
c=M33
d=M43
遠平面系數:
a=M14-M13
b=M24-M23
c=M34-M33
d=M44-M43
上述內容是涉及視截體計算的數學基礎,下一節實戰視截體編程!